此款飞控系统可包括如下模块:
主控模块通过读取安装在其内部的陀螺仪角速率信息,为无人机提供三轴角速率阻尼控制信号。
控制信号通过輸出模块输出给相应的执行机构,发直升机的十字盘舵机,油门舵机和尾舵机等,从而形成无人机控制的内环。
在主控模块和輸出模块组成的基本模块之上,再接入I模块,即可实现无人机的角度控制。
GPS导航模块:
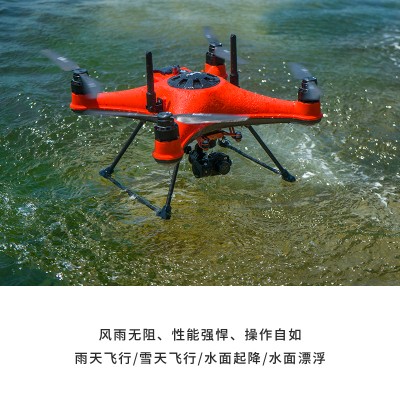
加GPS导航模块可实现速率阻尼控制功能,如:定高、半自动飞行,同时该套模块能实现自主飞行任务,如起飞、降落、巡线飞行等。该模块采用的是差分模块,可保证无人机的位置测量信息达到厘米级,控制精度达到±20厘米。