



 通过认证
通过认证 




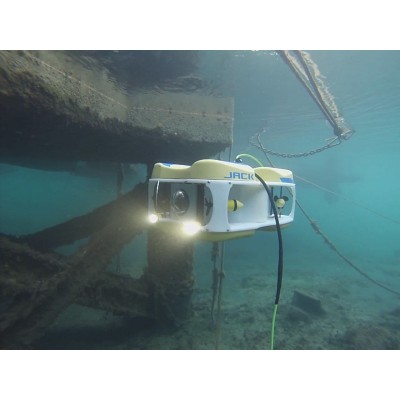
水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器;水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具; 无人遥控潜水器主要有有缆遥控潜水器和无缆遥控潜水器两种,其中有缆避控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。典型的遥控潜水器是由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。
结构功能
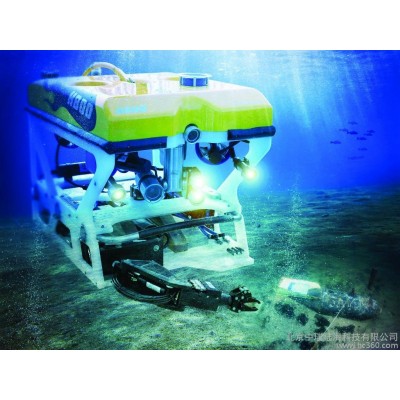
典型的遥控潜水器是由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。
潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视。靠电缆向本体提供动力和交换信息。中继器可减少电缆对本体运动的干扰。新型潜水器从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行监视并排除故障。开始研制智能水下机器人系统。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动、回避障碍、自主地完成指定任务。
无人有缆潜水器的发展趋势有以下见点:一是水深普遍在6000米;二是操纵控制系统多采用大容量计算机,实施处理资料和进行数字控制;三是潜水器上的机械手采用多功能,力反馈监控系统:四是增加推进器的数量与功率,以提高其顶流作业的能力和操纵性能。此外,还特别注意潜水器的小型化和提高其观察能力。

应用领域
安全检查
可用于检查大坝、桥墩上是否安装爆炸物以及结构好坏情况
遥控侦察、危险品靠近检查
水下基阵协助安装/拆卸
搜寻水下证据(公安、海关)
船侧、船底走私物品检测(公安、海关)
水下搜救
水下目标观察,废墟、坍塌矿井搜救等
海上救助打捞、近海搜索
搜寻残骸
(2011年伍兹霍尔海洋研究所提供的Remus 6000水下机器人在4000平方公里的海域中仅仅花了几天时间便找到了法航航班的残骸,而此前各种船只飞机寻找两年无果。)
搜寻黑盒子
(2014年3月8日马航客机MH370失联,截至2014年4月7日尚未找到,澳大利亚海事安全局联合协调中心召开发布会,搜救行动处境微妙,需要不断精确搜寻位置,不会放弃希望,搜索区域最深将达到5000米,将使用水下机器人搜寻黑匣子信号。[3])
水下娱乐
水下电视拍摄、水下摄影
潜水、划船、游艇;
看护潜水员,潜水前合适地点的选择
管道检查
可用于市政饮用水系统中水罐、水管、水库检查
排污/排涝管道、下水道检查
洋输油管道检查
跨江、跨河管道检查
船体检修;水下锚、推进器、船底探查
码头及码头桩基、桥梁、大坝水下部分检查
航道排障、港口作业
钻井平台水下结构检修、海洋石油工程
科研教学
水环境、水下生物的观测、研究和教学
海洋考察;
冰下观察
能源产业
核电站反应器检查、管道检查、异物探测和取出
水电站船闸检修;
水电大坝、水库堤坝检修(排沙洞口、拦污栅、泄水道检修)
考古应用
水下考古、水下沉船考察
渔业应用
深水网箱渔业养殖,人工渔礁调查
无人无缆潜水器尚处于研究、试用阶段,还有一些关键技术问题需要解决。无人无缆潜水器将向远程化、智能化发展,其活动范围在250~5000公里的半径内。这就要求这种无人无缆潜水器有能保证长时间工作的动力源。在控制和信息处理系统中,采用图像识别、人工智能技术、大容量的知识库系统,以及提高信息处理能力和精密的导航定位的随感能力等。如果这些问题都能解决了,那么无人无缆潜水器就能是名副其实的海洋智能机器人。海洋智能机器人的出现与广泛使用,为人类进入海洋从事各种海洋产业活动提供了技术保证。



