





仿真运动平台
本套基于伺服仿真运动平台,为电液伺服控制的油缸作为驱动器,伺服系统可以承受大负载,原理简单,容易实现,此平台根据应用需要涉及机械学、电器控制、计算机、传感器、空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列学科领域。六自由度运动平台是控制技术领域的皇冠级产品.此运动平台是由六支气缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只气缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种模拟器如飞行模拟器、航海模拟器、海军直升机起降模拟平台、坦克模拟器、汽车模拟器、火车驾驶模拟器、地震模拟器等领域,还可以应用到4D、5D影院和游戏娱乐厅中。
1 六自由度平台空间机构技术参数
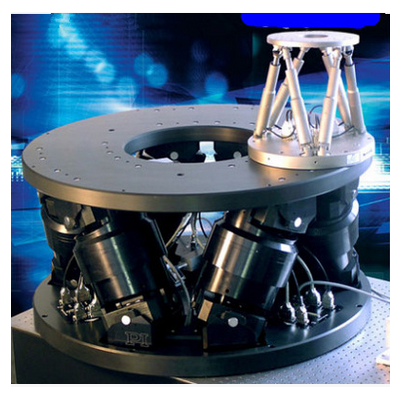
六自由度平台结构效果图如图1所示。
六自由度运动平台由上下平台和六个液压油缸组成。六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。上下三个支点分别在假设的圆周上,并且是120°等分,既分别是两个等边三角形的顶点。根据不同的运动范围,油缸的行程和上下平台半径不同。结构如图2所示。
2 仿真车运动平台空间运动
仿真运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动用途仿真车空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、回转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合震动等运动姿态。而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。整个运动模型如下:
L(i)=TT(α,β,γ,X,Y,Z)
其中,TT是一个空间转换矩阵模型。由此实时算出每一运动时刻液压油缸的行程。液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
根据平台的空间机构参数,空间运动参数如下:
位移
速度
加速度
定位精度
俯仰
±20°
22°/S
2°/S2
±1°
滚转
±17°
22°/S
2°/S2
±1°
偏航
±30°
22°/S
2°/S2
±1°
垂直升降
±200mm
0.5m/S
0.5m/ S2
±0.5mm
纵向位移
±200mm
0.5m/S
0.5m/ S2
±0.5mm
侧向位移
-200mm—+200mm
0.5m/S
0.5m/ S2
±0.5mm
3 仿真运动平台参数
伺服电机能耗:1.0Kw×6=6Kw
计算机控制系统能耗:0.5Kw
控制电器及直流电源:0.5Kw
总能耗:约7Kw
电源:220V± 10% V/50 2HZ
重量:2000KG
承载:500KG-1000KG