在无刷直流电动机中,定子绕组中的感应电动势与转子位置保持着确定的关系,根据"反电动势法"换相的无刷直流电机正是基于这一原理工作的。而感应电动势的幅值与电机的转速成正比。当电机静止或转速很低时,感应电动势幅值为0或很小,不足以用来确定转子磁极当前的位置,所以在无刷直流电机起动时不能根据反电动势进行换流。
为了保证无刷直流电机能够正常起动,首先需要确定转子的当前位置,在轻载条件下,对于具有梯形反电动势波形的天刷直流电机来说一般采用磁制动式电机转子定位方式。系统开始上电时,任意给定一组触发脉冲,在气隙中形成一个幅值恒定、方向不变的磁通,只要保证其幅值足够大,那么这一磁通就能在一定时间内将电机转子强行定位于这个方向上。
上图l-69(a)表示当VT1和VT6导通时电机转子的定位过程示意图。定位后电机转子d轴与定于绕组磁通方向重合。这样就确定了电机转子的初始位置。
但是,由于静止时电机转子位置的不确定性,如果在定位之前其位置恰好处于上图l-69(b)的位置,导通VT1和VT6后,定子绕组合成磁通Fa与转子d轴夹角为180度,此时电机转子不会旋转到如图1-69(a)所示的位置,定位失败。为了解决这一问题,可采用"连续二 次"定位的方法。如上图l-69(c)所示,在第一次定位的基础上,接着导通下一个状态,例如导通VT1和VT2,这样不论第一次定位成功或失败,第二次定位一定是成功的。
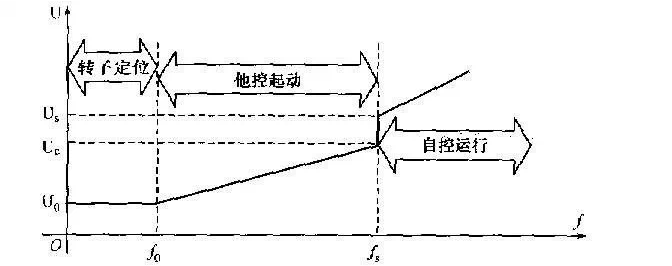
2. 电机的起动,三段式起动法。
确定了电机转子的初始位置后,由于此时定了绕组中的反电动势仍为零,所以必须人为地给电机施加一个由低频到高频不断加速的他控同步切换信号,使电机由静止 逐步加速运动,这一过程称为他控同步运行阶段。当电机反电动势的幅值随着转速的升高达到一定值,通过端电压或相电压检测已能够确知转子的位置时,将电机由他控同步运行切换到自控式运行,如图l-70所示。